基本术语
上式描述的就是一般意义上的优化问题。我们需要明确如下概念:
- 优化变量:
- 目标函数:
- 不等式约束:
- 等式约束:
如果没有约束,即
定义域
可行集(约束集)
最优值
最优点和局部最优点
如果
如果问题存在最优解,则称最优值是可得或可达的,称问题可解。如果
如果
则称可行解
的解。粗略地讲,这意味着
如果
举例
下面的例子都是定义在
但最优值不可达。
所以该问题无下界。
能取得唯一最优解。
可行性问题
如果目标函数恒等于零,那么其最优解要么是零(如果可行集非空),要么是
因此,可行性问题可以用来判断约束是否一致。如是,则找到一个满足它们的点。
优化问题的标准表述
我们可以通过转化的方式将优化问题的一般形式化为标准形式。例如一般的等式约束:
可以添加负号更变不等号的方向:
框约束直接约束变量的范围,其可行集看起来是一个方框。
可以将该问题表示成标准形式为
极大化问题
按习惯,我们主要考虑极小化问题。而极大化问题
可以通过在同样的约束下极小化
等价问题
如果对原优化问题进行一些变换后,
变量变换
设
关于
通过变量变换(或变量代换)
这两个问题显然是等价的。如果
目标函数和约束函数的变换
设
那么,问题
显然与标准形式的原问题等价。
举例
考虑无约束的 Euclid 范数极小化问题
因为范数是非负的,所以为了求解方便,我们一般求解范数的平方
这两个问题显然是等价的——因为最优解相同。但要注意,这两个问题是不同的问题。
松弛变量
通过观察我们可以得到一个简单的变换,即
其中
显然,松弛后的问题与原问题是等价的。如果
消除等式约束
设函数
那么,优化问题
与原问题等价。转换后的问题含义变量
消除线性等式约束
如果等式约束是线性的,即
引入等式约束
考虑问题
这个问题的目标函数和约束函数由函数
优化部分变量
这是一个简单而普适的规则,说明我们可以先优化一部分变量再优化另一部分变量来优化一个函数。
设变量
这种约束相互独立的问题适合采用每次只优化一部分变量的方法来进行优化。
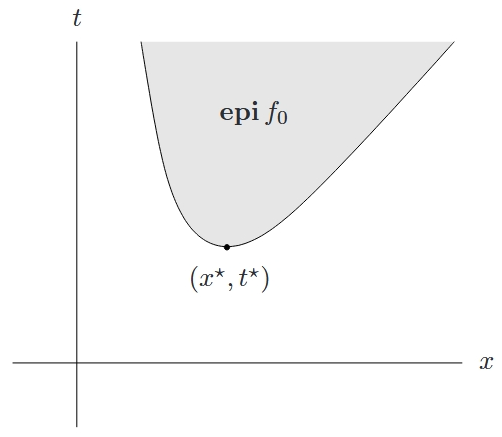
上镜图问题形式
其优化变量为
隐式与显式约束
我们可以通过改变定义域将任何约束隐式地表达在目标函数中。作为一个极端的例子,可以将标准形式问题表示为如下一个无约束问题
我们用
然而,这种变换仅仅只是一种符号游戏,它根本不能给求解带来丝毫的方便。